RC Stuff
How to Connect Walkera G-3D Gimbal to Naza-M V2 Controller

Aug
I recently purchased the Walkera G-3D 3 Axis gimbal for my DJI F450 (Naza-M V2) to find out that there really isn’t any documentation covering this particular setup. So, i headed over to the forums to see if anyone else was running into the same issue, thankfully I found others.
Unfortunately online directions are not as clear as a noob like me would understand, so using what seemed to be a successful installation (per this post), I set out to replicate and document the instructions in this guide. I am also including application configuration instructions that cover Naza-M setup and ensure all works.
To get started, lets cover what you’ll need in order to successfully complete this setup:
- Naza-M V2 with an available F2 port
- Walkera G-3D 3 Axis Gimbal
- Servo cable provided in the gimbal box that connects to the Data Wire coming out of the gimbal
- Power to the Gimbal from quad battery (min. of 3S)
- DJI NAZAM App (for gimbal configuration)
- GoPro or supported camera (to verify that control of gimbal works)
Naza-M V2, F2 Pin Allocation
In order for this to work you will need to remove the middle cable to a standard servo cable. To be clear, all you are doing to a standard servo connector is removing the middle pin.
- Top Pin (-) is your ground on the gimbal connector
- Middle Pin (+) should be left blank
- Bottom Pin (Signal) is the PIT (Pitch) on the gimbal connector

Walkera G-3D, Data Wire Pin Allocation
The Data wire coming out of the gimbal is a male servo connector. The connector is labeled top to bottom as follows:
- GND
- PIT
- ROLL
If you’re using the same servo cable (female end) you would need to make sure that you do the following:
Note: In the image below, the servo connector is flipped, so bottom of the connector is top.
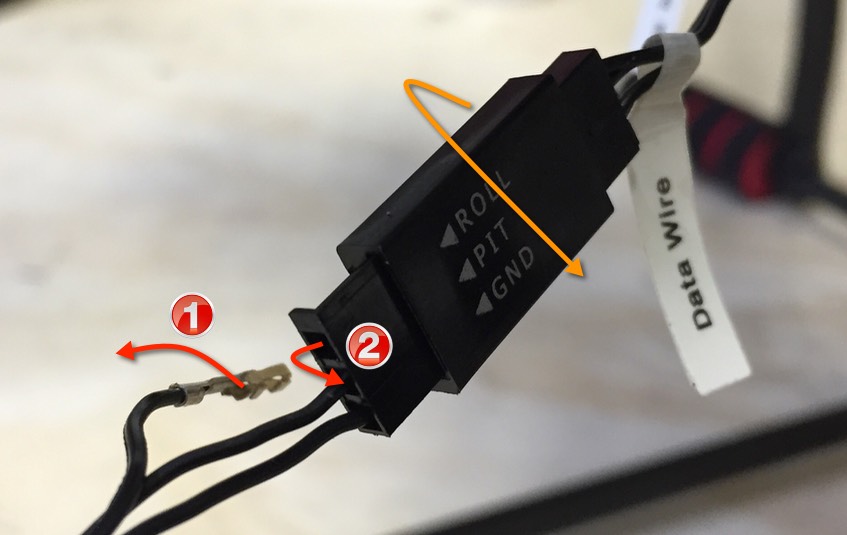
- Pull the middle pin (which is blank on the Naza controller end)
- Replace middle pin with the bottom pin
Note: Ground (GND) pin remains unchanged.
Once wiring is complete, attach your camera to the gimbal and power up the quad. If you are powering gimbal separately make sure it is powered up.
Walkera Gimbal Operation Modes
The Gimbal’s controller has two modes of operation, stick position and rate mode. The mode is set by toggling the SW switch from 0 to 1.
- Position 1 is stick position mode (the angle will mimic your stick position)
- Position 0 is rate mode (the angle will change as the stick position is adjusted)

Naza-M V2 Gimbal Configuration
Depending on your connection capabilities you would either connect to the controller via USB (LED) or via BTU module using your phone.
Once connected, launch the Naza M Assistant application and follow the instructions below to configure Naza for the Walkera Gimbal.
 Click Advanced on the main menu
Click Advanced on the main menu- Click Gimbal in the submenu that appears
- Click On in the Gimbal Switch section

Note: There are other parameters here that can be adjusted, but I found that the Gimbal was responsive, moved smoothly and required no additional parameter changes to work.
Assuming your transmitter is able to control F2 (channel is available), you should be able to operate the Gimbal’s pitch angle with the remote.
Share your experience configuring the G-3D gimbal with the Naza-M v2 flight below.
Would it be possible to use the G-3D with any other flight controllers? More precise, any of the current F4 or F3 based flight controllers
Ondrej, the pins are identified in the images. Are you not able to see the images?
Hello
Please help , I also gimbal G – 3D , but does not output connector.
Please identify the pins belong + – , roll and more
thank you for the advice